



































研究概要
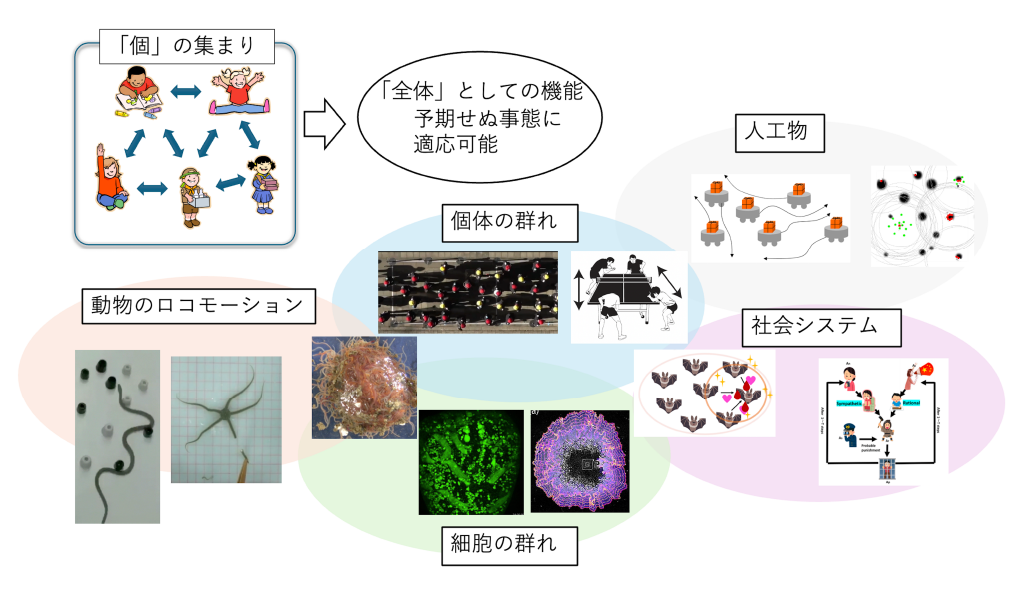
個々の要素が相互作用して全体としての秩序を生み出す自己組織化現象は、自然界や社会システムにおいて広く見られます。私は、数理モデリングを通して自己組織化現象の核となる原理を明らかにし、さらにその原理をもとにさまざまな系に適用可能な「理にかなった」自律分散制御手法を構築しようとしています。
当該シーズに関連する研究業績
- T. Kano, R. Yoshizawa, A. Ishiguro, Tegotae-based Decentralised Control Scheme for Autonomous Gait Transition of Snake-like Robots, Bioinpiration & Biomimetics, 12 (2017), 046009
- T. Kano, E. Sato, T. Ono, H. Aonuma, Y. Matsuzaka, A. Ishiguro, A Brittle Star-like Robot Capable of Immediately Adapting to Unexpected Physical Damage, Royal Society Open Science, 4 (2017), 171200
- T. Mikami, D. Wakita, R. Kobayashi, A. Ishiguro, T. Kano, Elongating, Entwining, and Dragging: Mechanism for Adaptive Locomotion of Tubificine Worm Blobs in a Confined Environment, Frontiers in Neurorobotics, 17 (2023), 1207374
この研究シーズに関係する教員
