































教員一覧 List of faculty members
山田 恭史 准教授
YAMADA, Yasufumi Associate Professor

山田 恭史 准教授
YAMADA Yasufumi所属:
複雑系知能学科、 複雑系情報科学領域(大学院)
研究分野
エコーロケーション、音響工学、数理生物学、動物行動学、バイオミメティクス前職・前歴
広島大学担当科目(学部)
確率論、アルゴリズムとデータ構造、プログラミング基礎、複雑系科学演習学位
博士(工学)
YAMADA, Yasufumi Associate Professor
Affiliation:
Department of Complex and Intelligent Systems
Research Fields
Echolocation, Bio-acoustics, Mathematical biology, Bio-inspired roboticsAcademic Background
Hiroshima UniversitySubjects in Charge (Undergraduate)
Probability Theory, Algorithms and Data Structures, Basic Programming, Exercise on Complex SystemsDegree
Ph. D(Engineering)研究内容
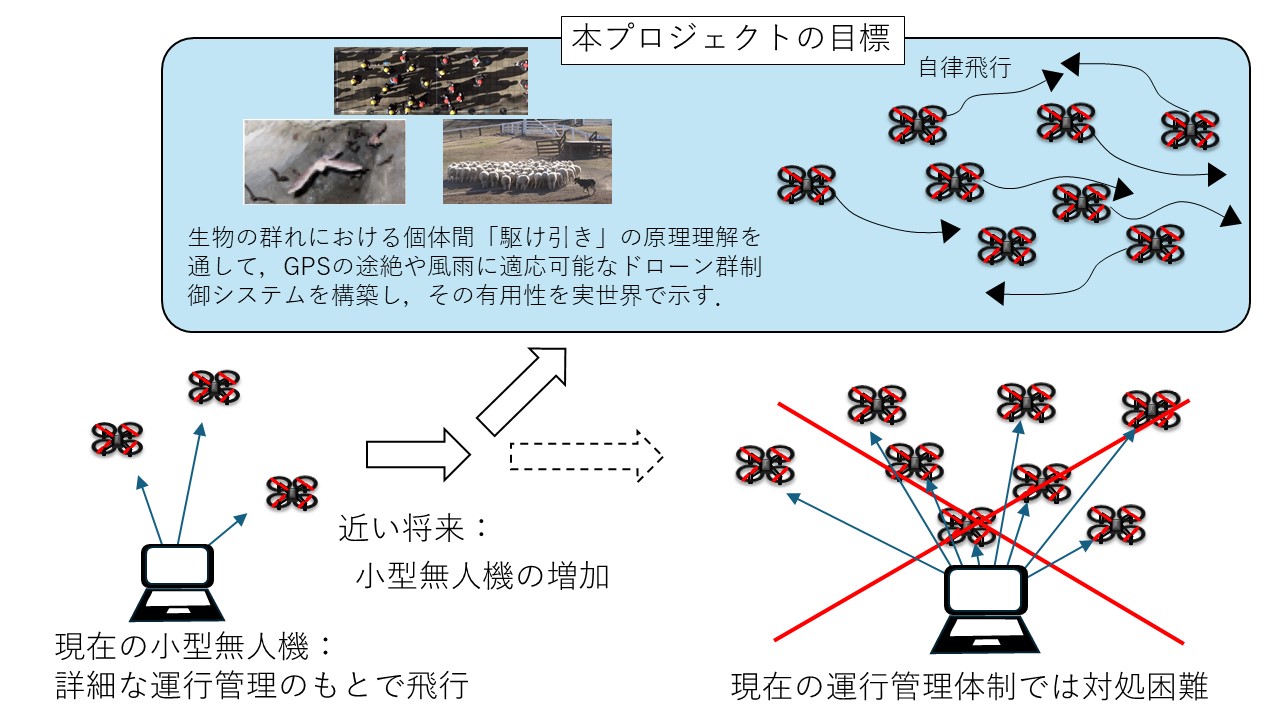
コウモリは自ら超音波パルスを放射し、周囲からの反響音を聴取分析するエコーロケーションにより3次元空間を把握し、現行の工学システムを凌駕するリアルタイム高速飛行ナビゲーションを実現させています。私は主に、コウモリの超音波センシングの運用法について、数理学・動物行動学・工学にわたる包括的な視点から研究をしています。コウモリの行動パターンを数理言語化し、ドローン等の実機に搭載することで、工学応用法を提案するとともに、彼らの行動のウラに隠された生体特有の機能の優位性について理解に励んでいます。
研究の魅力
『自由自治のもとで、大の大人が全力で挑む自然科学との知恵比べ』この点に、私は研究のロマンを感じています。さらに、自身の成果が国際原著論文として採択されると、google scholarからいつでもどこでも検索し、読むことができます。それらデータベースは我々の死後も消えません。つまり、人類の英知のささやかな1ページとして、生きた証が未来永劫残るのです。全力で挑むに値する価値が、そこにはあると思いませんか?
実績
学会における委員歴
- Review editor, Frontiers in Robotics and AI(2023年-現在)
- 計測自動制御学会 システム・情報部門 自律分散システム部会 部会運営委員(2022年-現在)
- 計測自動制御学会 システム・情報部門 自律分散システム部会 部会運営委員(部会研究会委員長担当)(2019年-2020年)
受賞歴
- 数学・数理科学専攻若手研究者のための異分野・異業種研究交流会ベストポスター発表賞(2020年)
- 日本音響学会秋季研究発表会学生優秀発表賞(2016年)
- NOLTA Best Paper Award 受賞(2016年)
- 日本動物行動学会 第31回大会ポスター賞(2012年)
- 第14回日本音響学会関西支部 若手研究者交流研究発表会奨励賞(2011年)
- 海洋音響学会 2011年度優秀論文発表賞(2011年)
代表者としての科学研究費
- 日本学術振興会: 科学研究費助成事業(若手研究)(2022年-2025年)
- 科研費助成事業(若手研究)(2019年-2022年)
- 日本学術振興会: 科学研究費補助金(研究活動スタート支援)(2017年-2019年)
- 日本学術振興会: 特別研究員奨励費(DC2)(2014年-2016年)
主な著作・論文
- T. Hiraga, Y. Yamada*(corresponding), R. Kobayashi: “Theoretical investigation of active listening behavior based on the echolocation of CF-FM bats”, PLOS comp. biol., 18(10), e1009784 (DOI: 10.1371/journal.pcbi.1009784), 2022.
- Y. Teshima*, Y. Yamada, T. Tsuchiya, O. Heim, S. Hiryu: “Analysis of echolocation behavior of bats in “echo space” using acoustic simulation”, BMC Biology 20(1): 1-12 (DOI: 10.1186/s12915-022-01253-y), 2022.
- K. Fujimori, B. Raytchev, K. Kaneda, Y. Yamada, Y. Teshima, E. Fujioka, S. Hiryu, T. Tamaki*: “Localization of flying bats from multichannel audio signals by estimating location map with convolutional neural networks”, Journal of Robotics and Mechatronics, 33(3), 515-525 (DOI: 10.20965/jrm.2021.p0515), 2021.
- Y. Yamada*, Y. Mibe, Y. Yamamoto, K. Ito, O. Heim, S. Hiryu: “Modulation of acoustic navigation behaviour by spatial learning in the echolocating bat Rhinolophus ferrumequinum nippon”, Scientific reports 10.1: 1-15 (DOI: 10.1038/s41598-020-67470-z), 2020.
- Y. Yamada*, Y. Watabe, S. Hiryu, R. Kobayashi: “3D Acoustic Localization Based on Echolocation Strategy of Bats”, Proceedings of 2020 IEEE/SICE International Symposium on System Integration: 1133-1138 (DOI: 10.1109/SII46433.2020.9025937), 2020.
- S. J. Yamazaki, K. Ohara, K. Ito, N. Kokubun, T. Kitanishi, D. Takaichi, Y. Yamada, Y. Ikejiri, F. Hiramatsu, K. Fujita, Y. Tanimoto, A. Yamazoe-Umemoto, K. Hashimoto, K. Sato, K. Yoda, A. Takahashi, Y. Ishikawa, A. Kamikouchi, S. Hiryu, T. Maekawa and K. D. Kimura*: “STEFTR: A Hybrid Versatile Method for State Estimation and Feature Extraction From the Trajectory of Animal Behavior”. Frontiers in neuroscience, 13 (article 626): 1-23 (DOI: 10.3389/fnins.2019.00626), 2019.
- Y. Yamada*, K. Ito, T. Tsuji, K. Otani, R. Kobayashi, Y. Watanabe, S. Hiryu: “Ultrasound navigation based on minimally designed vehicle inspired by the bio-sonar strategy of bats”, Journal of Advanced Robotics, 33: 169-182 (DOI: 10.1080/01691864.2019.1573470), 2019.
- Y. Yamada*, K. Ito, R. Kobayashi, S. Hiryu: “Practical and Numerical Investigation on a Minimal Design Navigation System of Bats”, Proceedings of Distributed, Ambient and Pervasive Interactions, 10921: 296-315 (DOI: 10.1007/978-3-319-91125-0_26), 2018.
- Y. Yamada*, K. Ito, R. Kobayashi, S. Hiryu: “Obstacle avoidance navigation system for cheap design sensing inspired by bio-sonar navigation of bats”, 56th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE). IEEE: 3-6 (DOI: 10.23919/SICE.2017.8105502),2017.
- Y. Yamada, S. Hiryu*, Y. Watanabe: “Species-specific control of acoustic gaze by echolocating bats, Rhinolophus ferrumequinum nippon and Pipistrellus abramus, during flight”, J. Comp.Physiol. A, 202: 791-801 (DOI: 10.1007/s00359-016-1121-0), 2016.
- Y. Yamada*, K. Ito, A. Oka, S. Tateiwa, T. Ohta, R. Kobayashi, S. Hiryu, Y. Watanabe: “Obstacle-Avoidance Navigation by an Autonomous Vehicle Inspired by a Bat Biosonar Strategy”, Proceedings of Biomimetic and Biohybrid Systems, 9222: 135-144 (DOI:10.1007/978-3-319-22979-9_14), 2015.
- I. Aihara*, Y. Yamada, E. Fujioka, S. Hiryu: “Nonlinear Dynamics in Free Flight of an Echolocating Bat.” Journal of Nonlinear Theory and Its Applications IEICE, 6: 313-328 (DOI:10.1587/nolta.6.313), 2014.
- Y. Yamada, A. Oka, S. Hiryu*, T. Ohta, H. Riquimaroux, Y. Watanabe: “Investigation of acoustic gaze strategy by Pipistrellus abramus and Rhinolophus ferrumequinum nippon during obstacle avoidance flight”, Proceedings of Meetings on Acoustics, 19: 1-9 (DOI: 10.1121/1.4800960),2013.
- N. Matsuta, S. Hiryu*, E. Fujioka, Y. Yamada, H. Riquimaroux, Y. Watanabe: “Adaptive beam-width control of echolocation sounds by CF–FM bats, Rhinolophus ferrumequinum nippon, during prey-capture flight”, J. Exp. Biol., 216: 1210-1218 (DOI: 10.1242/jeb.081398), 2013.
Research Contents
I’m interested in the bio-sonar strategies employed by bats. They accomplish the 3D acoustic navigation in real time by using simple designed sonar system consist of 1 transmitter and 2 receivers. My purpose is to understand the active sensing ingenuity of the bats and apply the bio-inspired navigation system to the autonomous flying drones.
Attractive Factors of My Research
“Done is betterthan perfect” This is a quote from from Zuckerberg.In classroom lecture, teacher always give you the solvable questions and solving method. But in research, you have to make up ploblem and solve it by yourself. I think these are the most atractive points of research activity. In these tasks, Zuckerberg’s words will help you.
Achievement
- Committee memberships: review editor, Frontiers in Robotics and AI (2023-present); committee member, Autonomous and Distributed Systems Subcommittee (2022-present);
- Awards: Best Poster Presentation Award, Interdisciplinary and Inter-industry Research Exchange for Young Researchers in Mathematics and Mathematical Sciences (2020); Best Student Presentation Award, Acoustical Society of Japan Fall Meeting (2016); NOLTA Best Paper Award (2016); Poster Award, 31st Annual Meeting of the Japanese Society for Animal Behavior ( 2012), Best Paper Presentation Award of the Marine Acoustics Society of Japan (2011).
- Scientific research funds as a representative: JSPS: Grant-in-Aid for Young Scientists (2022-2025), Grant-in-Aid for Young Scientists (2019-2022), JSPS: Grant-in-Aid for Scientific Research (Research Activity Start-up Support) (2017-2019), JSPS: Special Fellowship (DC2) (2014-2016)
Major Books and Papers
- T. Hiraga, Y. Yamada*(corresponding), R. Kobayashi: “Theoretical investigation of active listening behavior based on the echolocation of CF-FM bats”, PLOS comp. biol., 18(10), e1009784 (DOI: 10.1371/journal.pcbi.1009784), 2022.
- Y. Teshima*, Y. Yamada, T. Tsuchiya, O. Heim, S. Hiryu: “Analysis of echolocation behavior of bats in “echo space” using acoustic simulation”, BMC Biology 20(1): 1-12 (DOI: 10.1186/s12915-022-01253-y), 2022.
- K. Fujimori, B. Raytchev, K. Kaneda, Y. Yamada, Y. Teshima, E. Fujioka, S. Hiryu, T. Tamaki*: “Localization of flying bats from multichannel audio signals by estimating location map with convolutional neural networks”, Journal of Robotics and Mechatronics, 33(3), 515-525 (DOI: 10.20965/jrm.2021.p0515), 2021.
- Y. Yamada*, Y. Mibe, Y. Yamamoto, K. Ito, O. Heim, S. Hiryu: “Modulation of acoustic navigation behaviour by spatial learning in the echolocating bat Rhinolophus ferrumequinum nippon”, Scientific reports 10.1: 1-15 (DOI: 10.1038/s41598-020-67470-z), 2020.
- Y. Yamada*, Y. Watabe, S. Hiryu, R. Kobayashi: “3D Acoustic Localization Based on Echolocation Strategy of Bats”, Proceedings of 2020 IEEE/SICE International Symposium on System Integration: 1133-1138 (DOI: 10.1109/SII46433.2020.9025937), 2020.
- S. J. Yamazaki, K. Ohara, K. Ito, N. Kokubun, T. Kitanishi, D. Takaichi, Y. Yamada, Y. Ikejiri, F. Hiramatsu, K. Fujita, Y. Tanimoto, A. Yamazoe-Umemoto, K. Hashimoto, K. Sato, K. Yoda, A. Takahashi, Y. Ishikawa, A. Kamikouchi, S. Hiryu, T. Maekawa and K. D. Kimura*: “STEFTR: A Hybrid Versatile Method for State Estimation and Feature Extraction From the Trajectory of Animal Behavior”. Frontiers in neuroscience, 13 (article 626): 1-23 (DOI: 10.3389/fnins.2019.00626), 2019.
- Y. Yamada*, K. Ito, T. Tsuji, K. Otani, R. Kobayashi, Y. Watanabe, S. Hiryu: “Ultrasound navigation based on minimally designed vehicle inspired by the bio-sonar strategy of bats”, Journal of Advanced Robotics, 33: 169-182 (DOI: 10.1080/01691864.2019.1573470), 2019.
- Y. Yamada*, K. Ito, R. Kobayashi, S. Hiryu: “Practical and Numerical Investigation on a Minimal Design Navigation System of Bats”, Proceedings of Distributed, Ambient and Pervasive Interactions, 10921: 296-315 (DOI: 10.1007/978-3-319-91125-0_26), 2018.
- Y. Yamada*, K. Ito, R. Kobayashi, S. Hiryu: “Obstacle avoidance navigation system for cheap design sensing inspired by bio-sonar navigation of bats”, 56th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE). IEEE: 3-6 (DOI: 10.23919/SICE.2017.8105502),2017.
- Y. Yamada, S. Hiryu*, Y. Watanabe: “Species-specific control of acoustic gaze by echolocating bats, Rhinolophus ferrumequinum nippon and Pipistrellus abramus, during flight”, J. Comp.Physiol. A, 202: 791-801 (DOI: 10.1007/s00359-016-1121-0), 2016.
- Y. Yamada*, K. Ito, A. Oka, S. Tateiwa, T. Ohta, R. Kobayashi, S. Hiryu, Y. Watanabe: “Obstacle-Avoidance Navigation by an Autonomous Vehicle Inspired by a Bat Biosonar Strategy”, Proceedings of Biomimetic and Biohybrid Systems, 9222: 135-144 (DOI:10.1007/978-3-319-22979-9_14), 2015.
- I. Aihara*, Y. Yamada, E. Fujioka, S. Hiryu: “Nonlinear Dynamics in Free Flight of an Echolocating Bat.” Journal of Nonlinear Theory and Its Applications IEICE, 6: 313-328 (DOI:10.1587/nolta.6.313), 2014.
- Y. Yamada, A. Oka, S. Hiryu*, T. Ohta, H. Riquimaroux, Y. Watanabe: “Investigation of acoustic gaze strategy by Pipistrellus abramus and Rhinolophus ferrumequinum nippon during obstacle avoidance flight”, Proceedings of Meetings on Acoustics, 19: 1-9 (DOI: 10.1121/1.4800960),2013.
- N. Matsuta, S. Hiryu*, E. Fujioka, Y. Yamada, H. Riquimaroux, Y. Watanabe: “Adaptive beam-width control of echolocation sounds by CF–FM bats, Rhinolophus ferrumequinum nippon, during prey-capture flight”, J. Exp. Biol., 216: 1210-1218 (DOI: 10.1242/jeb.081398), 2013.
NEWS
「山田 恭史」に関連する最新のニュース