






























教員一覧 List of faculty members
加納 剛史 教授
KANO, Takeshi Professor

加納 剛史 教授
KANO Takeshi所属:
複雑系知能学科、 複雑系情報科学領域、 知能情報科学領域
研究分野
自律分散制御、数理モデリング前職・前歴
東北大学学位
博士(理学)(大阪大学、2008年3月)
KANO, Takeshi Professor
Affiliation:
Department of Complex and Intelligent Systems
Research Fields
Autonomous decentralized control, Mathematical modelingAcademic Background
Tohoku UniversityDegree
Ph. D. (Osaka University, Mar., 2008)Related Links
研究内容
個々の要素が相互作用して全体としての機能を生み出す自律分散システムは、自然界や社会システムにおいて広く見られます。自律分散システムは、システムを取り巻く環境の変化やシステムの一部の故障に対して柔軟に適応できるという利点を有しています。私は、主に数理モデリングを通して自律分散システムの「個」と「全体」をつなぐ原理を明らかにし、さらにその原理をもとに汎用性の高い「理にかなった」自律分散制御手法を構築して、新しい工学システムの設計に役立てようとしています。
研究の魅力
私の研究分野は非常に学際的で、現象数理学・数理生物学・物理学・制御工学・ロボット工学・生物学・医学・社会科学・スポーツ科学などにまたがっています。分野の垣根を超えたユニークな議論を展開できるところが魅力です。
実績
代表的な研究成果を2つ紹介します。
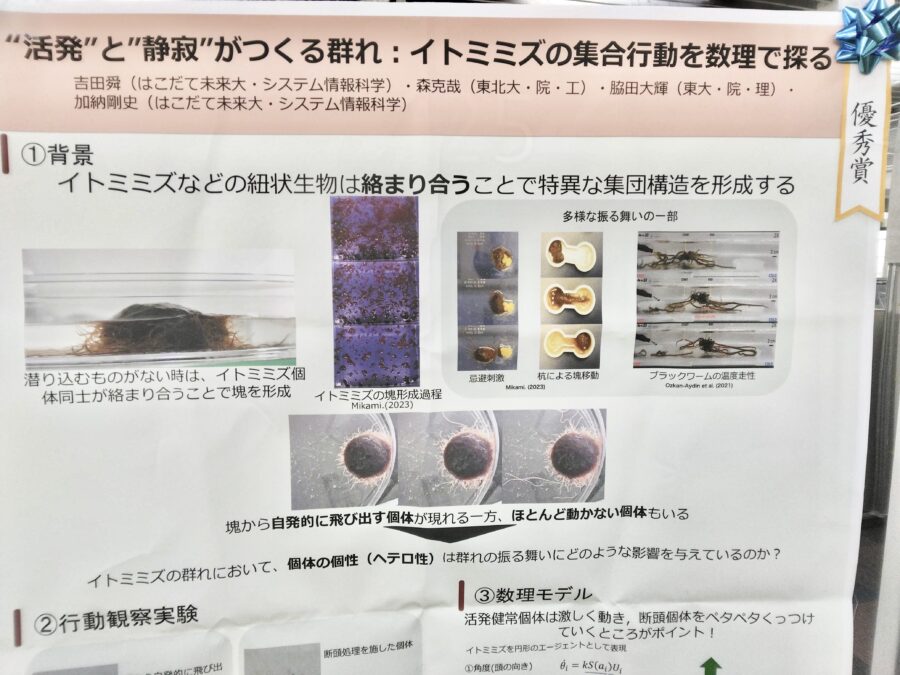
ミミズ団子のほふく前進 〜デコボコ地面を味方につけた変幻自在のうじゃうじゃ集合体〜
https://www.tohoku.ac.jp/japanese/2023/08/press20230829-03-worm.html
太さ0.3 mm、長さ10−40mm程度の小さなミミズであるイトミミズは、しばしばその柔軟な身体をくねらせ、たくさんの個体が互いに絡まり合って団子のような塊を形成します。このイトミミズの塊は、あたかも一つの生き物であるかのように、状況に応じて形を変えながら動き回ります。我々は、行動観察実験、数理モデリング、シミュレーションを通して、イトミミズの塊が地面の凹凸を利用して移動するしくみを明らかにしました。この成果は、動物の群れが複雑なデコボコした自然界で動き回るしくみの理解のみならず、たくさんの「やわらかい」ロボットが協調して変幻自在に機能を発揮する、新しい工学システムの実現につながると期待されます。
クモヒトデに学んだ、想定外の故障に「即座に」適応可能な移動ロボット 〜シンプルな数式でクモヒトデの複雑な動きを表現〜
http://www.tohoku.ac.jp/japanese/2017/12/press20171211-01.html
クモヒトデは、5本の柔軟な腕を有する棘皮動物です。クモヒトデには「脳」のような高度な情報処理を担う中枢神経系はなく、放射神経と呼ばれる単純な神経系しかないにもかかわらず、外敵に襲われるなどして腕を失った際、残った腕が何本であろうともそれらを即座に協調させて推進し続けることができます。本研究では、腕を切断したクモヒトデの行動観察結果をもとに、「各腕が環境から進行方向側に反力を受けたときにのみ地面を蹴る」という、シンプルな数式で記述される自律分散制御則を設計しました。そして、この制御則をクモヒトデ型ロボットに実装したところ、腕をいかように破壊しても数秒以内に適応して動き続けることができました。この成果は、身体の一部が故障しても機能し続けられる移動ロボットの実現へと道を切り拓くと期待されます。
主な著作・論文
- D. Owaki, T. Kano, K. Nagasawa, A. Tero, A. Ishiguro, Simple Robot Suggests Physical Interlimb Communication is Essential for Quadruped Walking, Journal of the Royal Society Interface, 10 (2013), 20120669
- T. Kano, R. Yoshizawa, A. Ishiguro, Tegotae-based Decentralised Control Scheme for Autonomous Gait Transition of Snake-like Robots, Bioinpiration & Biomimetics, 12 (2017), 046009
- T. Kano, E. Sato, T. Ono, H. Aonuma, Y. Matsuzaka, A. Ishiguro, A Brittle Star-like Robot Capable of Immediately Adapting to Unexpected Physical Damage, Royal Society Open Science, 4 (2017), 171200
- T. Kano, K. Yasui, T. Mikami, M. Asally, A. Ishiguro, An Agent-based Model of the Interrelation between the COVID-19 Outbreak and Economic Activities, Proceedings of the Royal Society A, 477 (2021), 20200604
- T. Kano, T. Kanno, T. Mikami, A. Ishiguro, Active-sensing-based Decentralized Control of Autonomous Mobile Agents for Quick and Smooth Collision Avoidance, Frontiers in Robotics and AI 9, (2022), 992716
- R. Thandiackal, K. Melo, L. Paez, J. Herault, T. Kano, K. Akiyama, F. Boyer, D. Ryczko, A. Ishiguro, A. J. Ijspeert, Emergence of Robust Self-Organized Undulatory Swimming Based on Local Hydrodynamic Force Sensing, Science Robotics, 6 (2021), eabf6354
- T. Mikami, D. Wakita, R. Kobayashi, A. Ishiguro, T. Kano, Elongating, Entwining, and Dragging: Mechanism for Adaptive Locomotion of Tubificine Worm Blobs in a Confined Environment, Frontiers in Neurorobotics, 17 (2023), 1207374
Research Contents
Autonomous decentralized systems, where individual elements interact to generate the overall functionality, are widely observed in the natural and social systems. Autonomous decentralized systems have the advantage of being able to adapt flexibly to changes in the surrounding environment and partial failures of the system. I primarily aim to elucidate the principles that connect the ‘individual’ and the ‘whole’ of autonomous decentralized systems through mathematical modeling. Furthermore, based on these principles, I am working to construct a versatile ‘rationally justified’ autonomous decentralized control method that can contribute to the design of new engineering systems.
Attractive Factors of My Research
My field of research is interdisciplinary—at the crossroads between applied mathematics, mathematical biology, physics, control engineering, robotics, biology, medicine, social science, and sport science. The appeal lies in the ability to engage in unique discussions that transcend the boundaries of fields.
Achievement
Two representative research outcomes:
Worm Aggregates Leverage Uneven Terrain to Collectively Move Through Narrow Spaces
The small earthworm known as tubificine worms, with a diameter of 0.3 mm and a length of approximately 10-40 mm, often twists its flexible body, with many individuals intertwining to form a clustered mass resembling a ball. This cluster of tubificine worms, seemingly acting as a single organism, dynamically changes shape and moves according to the situation. Through behavioral observation experiments, mathematical modeling, and simulations, we have elucidated the mechanism by which clusters of tubificine worms utilize the unevenness of the ground for movement. This achievement is expected not only to contribute to the understanding of how animal groups navigate through complex uneven terrains but also to pave the way for the realization of new engineering systems where numerous “soft” robots cooperate to function flexibly.
Brittle Stars inspire new generation robots able to adapt to physical damage
https://www.tohoku.ac.jp/en/press/brittle_stars_inspire_new_robots.html
The brittle star is an echinoderm with five flexible arms. Despite lacking a central nervous system akin to a “brain” responsible for advanced information processing and having only a simple nervous system called the radial nerve, brittle stars can promptly coordinate and propel any remaining arms, regardless of their number, after losing some due to attacks by external threats. In this study, based on observations of the behavior of brittle stars with severed arms, we designed a decentralized control rule described by a simple equation: “each arm kicks the ground only when it receives a reactive force from the environment on the direction of progression.” Implementing this control rule in a brittle star-type robot enabled it to adapt and continue moving within seconds even when some arms were intentionally damaged. This accomplishment is anticipated to open the way for the realization of mobile robots that can continue functioning despite partial failures in their bodies.
Major Books and Papers
- D. Owaki, T. Kano, K. Nagasawa, A. Tero, A. Ishiguro, Simple Robot Suggests Physical Interlimb Communication is Essential for Quadruped Walking, Journal of the Royal Society Interface, 10 (2013), 20120669
- T. Kano, R. Yoshizawa, A. Ishiguro, Tegotae-based Decentralised Control Scheme for Autonomous Gait Transition of Snake-like Robots, Bioinpiration & Biomimetics, 12 (2017), 046009
- T. Kano, E. Sato, T. Ono, H. Aonuma, Y. Matsuzaka, A. Ishiguro, A Brittle Star-like Robot Capable of Immediately Adapting to Unexpected Physical Damage, Royal Society Open Science, 4 (2017), 171200
- T. Kano, K. Yasui, T. Mikami, M. Asally, A. Ishiguro, An Agent-based Model of the Interrelation between the COVID-19 Outbreak and Economic Activities, Proceedings of the Royal Society A, 477 (2021), 20200604
- T. Kano, T. Kanno, T. Mikami, A. Ishiguro, Active-sensing-based Decentralized Control of Autonomous Mobile Agents for Quick and Smooth Collision Avoidance, Frontiers in Robotics and AI 9, (2022), 992716
- R. Thandiackal, K. Melo, L. Paez, J. Herault, T. Kano, K. Akiyama, F. Boyer, D. Ryczko, A. Ishiguro, A. J. Ijspeert, Emergence of Robust Self-Organized Undulatory Swimming Based on Local Hydrodynamic Force Sensing, Science Robotics, 6 (2021), eabf6354
- T. Mikami, D. Wakita, R. Kobayashi, A. Ishiguro, T. Kano, Elongating, Entwining, and Dragging: Mechanism for Adaptive Locomotion of Tubificine Worm Blobs in a Confined Environment, Frontiers in Neurorobotics, 17 (2023), 1207374