






























教員一覧 List of faculty members
鈴木 昭二 副学長、研究科長、教授
SUZUKI, Sho’ji Vice President, Dean, Professor

鈴木 昭二 副学長、研究科長、教授
SUZUKI Sho'ji所属:
複雑系知能学科、 知能情報科学領域
研究分野
ロボット工学前職・前歴
大阪大学担当科目(学部)
微分方程式、制御理論、情報処理演習Ⅰ、ロボティクス担当科目(大学院)
自律システム特論Ⅱ学位
博士(工学)
SUZUKI, Sho’ji Vice President, Dean, Professor
Affiliation:
Department of Complex and Intelligent Systems、 Intelligent Information Science Field
Research Fields
RoboticsAcademic Background
Osaka UniversitySubjects in Charge (Undergraduate)
Differential Equations, Information Processing Practice 1, Control Theory, Robotics, Advanced Topics in Autonomous System 2(Graduate School)Degree
Ph.D研究内容
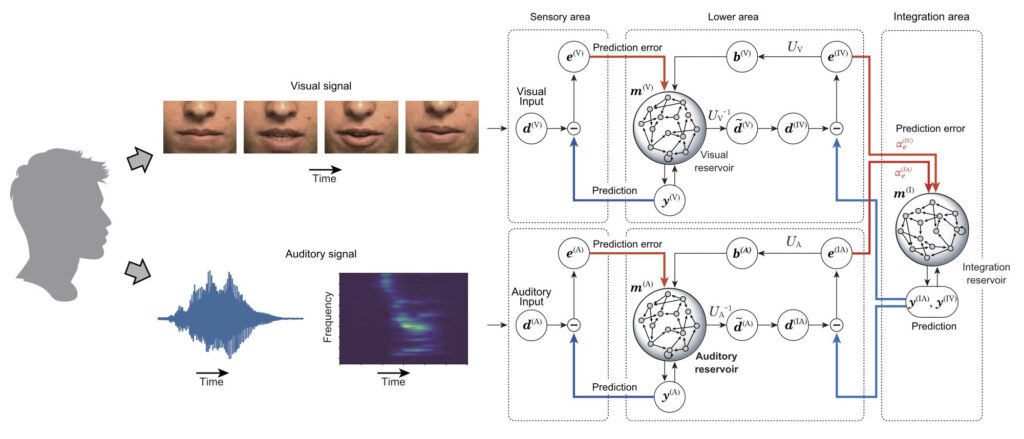
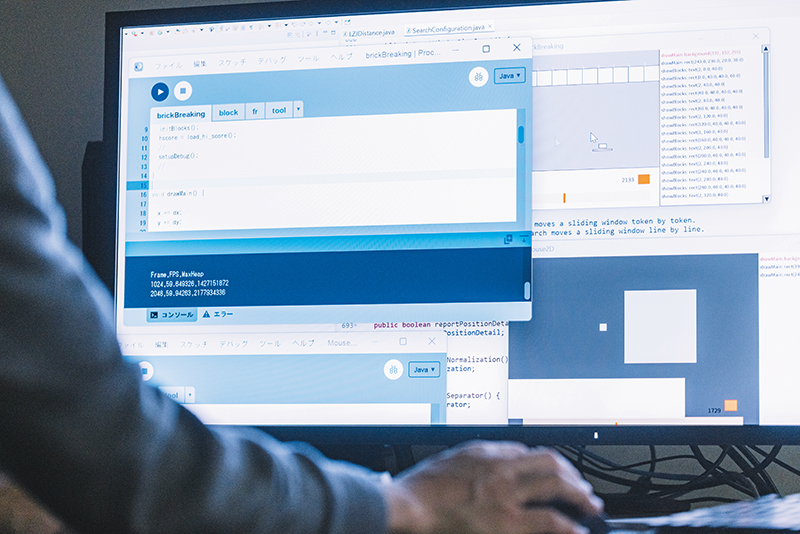
ロボットの高機能化に役立つ技術に興味を持ち、特にロボットが自分自身の周囲の環境を認識する上で重要となるセンサシステムの実現に取り組んできました。最近は、実世界におけるロボットの応用やロボットの分野で培われた技術の他分野における活用にも興味を持っています。
研究の魅力
実世界で動くものを実現する点がロボット研究の最大の魅力です。機構、センサ、コンピュータ、そして様々なレベルで動作するソフトウェアを統合し目の前で動くシステムを実現する過程こそがロボット研究の面白さです。
実績
- 受賞:日本機械学会ロボティクスメカトロニクス部門欧文誌表彰, 2015年5月 May, 2015 .
- 講習会:インターネットを利用したロボットサービス基盤としてのRSNP講習会,2015年5月 May, 2015 .
- 講習会:インターネットを利用したロボットサービス基盤としてのRSNP講習会,2014年5月 May, 2014 .
- 特許出願:障害物接近検知方法及びそれに用いられる照明装置,特願2013-265627,2013年12月 December, 2013 .
- 受賞:RSNPを利用したサービスロボットコンテスト2013優秀賞( ロボットビジネス推進協議会賞), 2013年9月 September, 2013 .
- 受賞:RSNPを利用したサービスロボットコンテスト2012優秀賞( 日本ロボット学会ネットワークを利用したロボットサービス研究専門委員会賞),2012年9月 September, 2012 .
- 特許出願:画像撮像装置および画像提示システム, 特願2012-550692(PCT/JP2011/006832), 2012年6月 June, 2012 .
主な著作・論文
- 鈴木昭二,拡張現実(AR)が観光にもたらすインパクト,観光情報学入門,pp. 43-54,近代科学社,2015.
- Sho’ji Suzuki, Ryoutarou Suda: A Vision System with Wide Field of View and Collision Alarms for Teleoperation of Mobile Robots, ROBOMECH Journal, Vol. 1, No. 8, Springer, 2014.
- 鈴木昭二,橋本真一,布村重樹: 観光の楽しみを広げる拡張現実感用コンテンツ制作の試み,情報処理学会デジタルプラクティス, Vol. 3, No. 4, pp. 313-322, 2012.
- Suzuki, S. : A Vision System for Remote Control of Mobile Robot to Enlarge Field of View in Horizontal and Vertical, Proc. of the 2011 IEEE International Conference on Robotics and Biomimetics (ROBIO 2011), pp. 8-13, 2011.
- 小松孝徳,鈴木昭二,鈴木恵二,松原仁,小野哲雄,坂本大介,佐藤崇正,内本友洋,岡田孟,北野勇,棟方渚,佐藤智則,高橋和之,本間正人,長田純一,畑雅之,乾英雄:”非ロボット技術者のための直感的ロボットオーサリングシステムの提案”,日本バーチャルリアリティ学会論文誌,Vol.11,No.2,pp.213-224, 2006.
- S.Suzuki, T.Kato, M.Asada, and K.Hosoda: “Behavior Learning for a Mobile Robot with Omnidirectional Vision
Enhanced by an Active Zoom Mechanism”, Intelligent Autonomous System 5(IAS-5), pp.242-249, June 1998. - S.Suzuki, Y.Arai, S.Kotosaka, H.Asama, H.Kaetsu, and I.Endo: ” Development of an Infrared Sensory System with Local Communication Facility for Collision Avoidance of Multiple Mobile Robots”, Journal of Robotics and Mechatronics, Vol.9, No.5, pp.354-361, 1997.
- 鈴木,新井,琴坂,淺間,嘉悦,遠藤:”マルチ移動ロボット環境における衝突回避のための局所的な通信を利用したセンサシステムの開発”,日本機械学会論文集C編,第62巻,第602号,pp.3752-3758,1996.
- 鈴木,木元,油田:”移動ロボットの自律行動のためのプログラム開発環境の構築”,日本ロボット学会誌, Vol.12, No.3, pp.497-506, 1994.
- S.Yuta, S.Suzuki, and S.Iida: “Implementation of a small size experimental self-contained autonomous robot -sensors, vehicle econtrol, and description of sensor based behavior”, Experimental Robotics II (The 2nd International Symposium, Toulouse France, June 1991), Lecture Notes in Control and Information Sciences 190, Springer-Verlag, pp. 344-358, 1993.
Research Contents
I am interesiting in robotic technology which can proguress robots’ ability, especially in sensing system used for aquiring environmental information around the robot. Recently I am also interesting in applications of robots in society and adaptation of robotic technology to other research domain.
Attractive Factors of My Research
A robot is a result of implementation of a system integrated by mechanisms, sensing devices, computers, and software excuted in various level.
Achievements
- Award: The Japan Society of Mechanical Engineers, Robotics and Mechatronics Division, Certificate of Merit for ROBOMECH Journal Best Paper, 2015.
- Patent Application: IMAGE CAPTURING DEVICE AND IMAGE PRESENTATION SYSTEM, PCT/JP2011/006832, 2011.
Major Books and Papers
- Sho’ji Suzuki, Ryoutarou Suda: A Vision System with Wide Field of View and Collision Alarms for Teleoperation of Mobile Robots, ROBOMECH Journal, Vol. 1, No. 8, Springer, 2014.
- Suzuki, S. : A Vision System for Remote Control of Mobile Robot to Enlarge Field of View in Horizontal and Vertical, Proc. of the 2011 IEEE International Conference on Robotics and Biomimetics (ROBIO 2011), pp. 8-13, 2011.
- S.Suzuki, T.Kato, M.Asada, and K.Hosoda: “Behavior Learning for a Mobile Robot with Omnidirectional Vision
- Enhanced by an Active Zoom Mechanism”, Intelligent Autonomous System 5(IAS-5), pp.242-249, June 1998.
- S.Suzuki, Y.Arai, S.Kotosaka, H.Asama, H.Kaetsu, and I.Endo: ” Development of an Infrared Sensory System with Local Communication Facility for Collision Avoidance of Multiple Mobile Robots”, Journal of Robotics and Mechatronics, Vol.9, No.5, pp.354-361, 1997.
- S.Yuta, S.Suzuki, and S.Iida: “Implementation of a small size experimental self-contained autonomous robot -sensors, vehicle control, and description of sensor based behavior”, Experimental Robotics II (The 2nd International Symposium, Toulouse France, June 1991), Lecture Notes in Control and Information Sciences 190, Springer-Verlag, pp. 344-358, 1993.