
加納剛史教授(複雑系知能学科)、山田恭史准教授(複雑系知能学科)らの研究開発課題が、科学技術振興機構(JST)の経済安全保障重要技術育成プログラム(K Program)における新規採択研究開発課題に採択されました。
採択された研究開発課題は、個別研究型「空域利用の安全性を高める複数の小型無人機等の自律制御・分散制御技術及び検知技術」のうち、「小型無人機等の自律制御・分散制御技術」です。
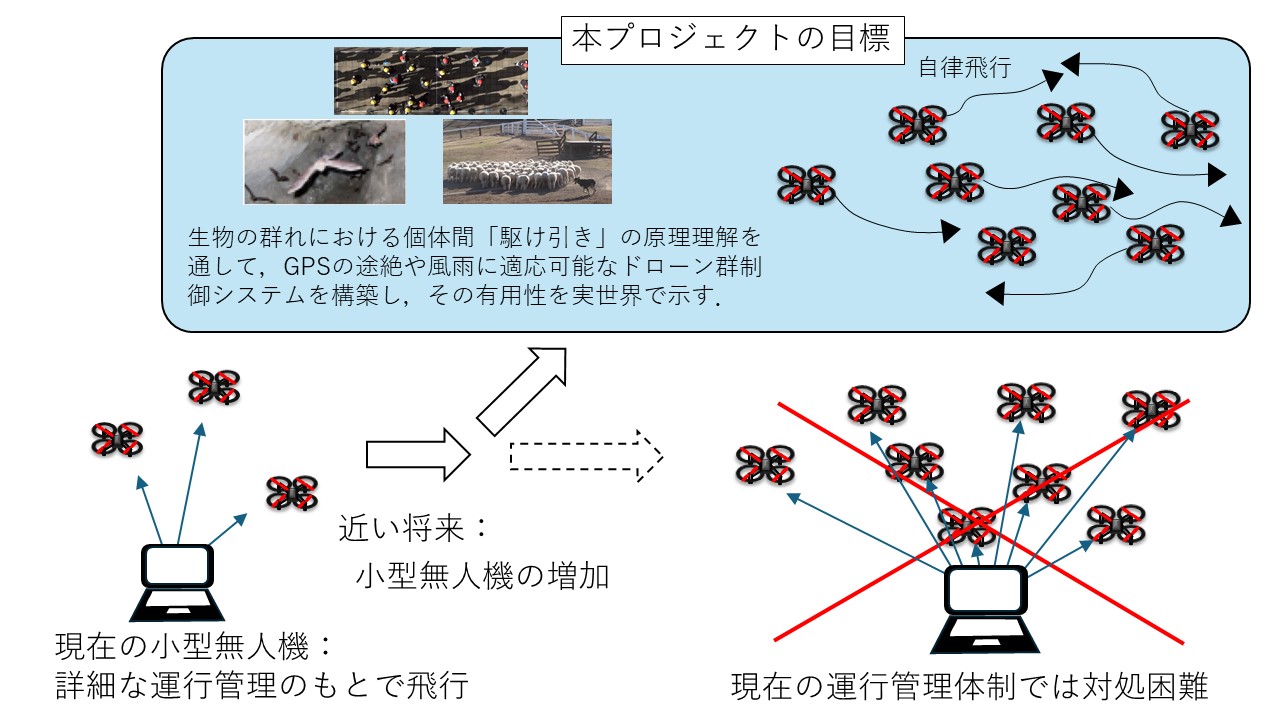
本研究開発では、動物個体間の「駆け引き」の原理を抽出することで、小型無人機群の自律分散制御法を構築します。人間やコウモリが互いに衝突を回避する行動や、少数の牧羊犬が多数のヒツジを誘導するシープドッグシステムに着目し、「駆け引き」の原理解明に取り組みます。
このプログラムでは、中長期的に日本が国際社会において確固たる地位を確保し続ける上で不可欠な要素となる先端的な重要技術を育成するため、国が定めた研究開発ビジョンや研究開発構想に基づき、研究開発を実施します。
研究開発課題名:動物個体間「駆け引き」に学ぶ小型無人機群の誘導・衝突回避手法の開発(仮称)
※研究開発課題名は調整により変更になることがあります。
研究代表者:加納 剛史
研究分担者:山田 恭史